

توضیحات
شبیه سازی آموزشی مقاله تقریب سیستم های کنترل تاخیر زمانی با متلب
چکیده مقاله (ترجمه ماشینی)
با معادلات دیفرانسیل تاخیری که تحت شرایط اختلالات ناشناخته کنترل می شود. این سیستم توسط یک سیستم معادلات دیفرانسیل معمولی که به عنوان یک رهبر استفاده می شود تقریب می شود. یک روش هدف گیری بین سیستم های تاخیر و تقریب شرح داده شده است. رویه به گونه ای سازماندهی شده است که نزدیکی لازم حرکات این سیستم ها با استفاده از کنترل سیستم تاخیری و بخش خاصی از کنترل های تقریبی سیستم تضمین می شود. بخش دیگری از کنترل های سیستم تقریبی را می توان برای جبران اختلالات در سیستم تاخیر اولیه و اطمینان از کیفیت مورد نیاز فرآیند کنترل استفاده کرد. بنابراین، با استفاده از سیستم های دیفرانسیل تاخیری دقیق.
مقدمه
تحقیق در مورد تقریب معادلات دیفرانسیل تاخیری توسط معادلات دیفرانسیل معمولی سابقه گسترده ای دارد. همگرایی چنین تقریبی برای سیستم های خطی با تاخیر ثابت در کراسوفسکی (1964) به اثبات رسید. در Repin (1965)، این نتیجه به سیستمهای غیرخطی و در Kurjanskii (1967) – به مورد تاخیرهای متغیر تعمیم داده شد. بعدها، تقریبهای مشابه، تعمیمها و کاربردهای آنها برای انواع مختلف مسائل مورد توجه قرار گرفت، برای مثال، کرایاجیمسکی (1978)، بنکس و برنز (1978)، بنکس و کاپل (1979)، کونیش (1980)، فابیانو (2013). در رویکرد نظری بازی (به عنوان مثال، کراسوفسکی (1985)، کراسوفسکی و ساببوتین (1988) را ببینید)، در کراسوفسکی و کوتلنیکووا (2011) پیشنهاد شد که از سیستم تقریبی معادلات دیفرانسیل معمولی به عنوان یک رهبر برای اولین بار استفاده شود. -سیستم دینامیکی تاخیری که تحت شرایط اغتشاش یا واکنش کنترل می شود. نتایج مربوط به اعتبار چنین روش کنترلی برای یک کلاس کاملاً کلی از سیستم های دیفرانسیل تاخیری در مقاله حاضر ارائه شده است. انجام پروژه متلب
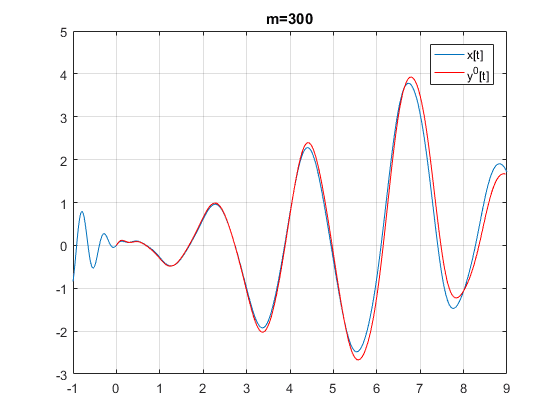
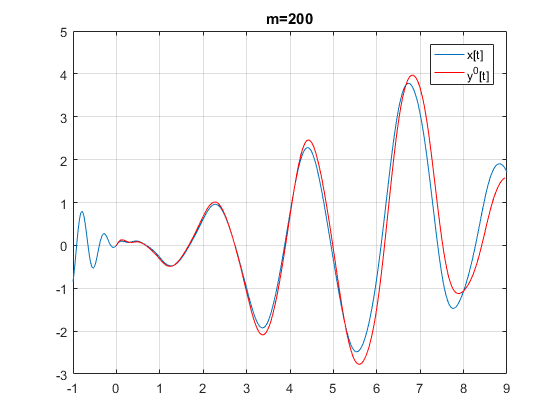
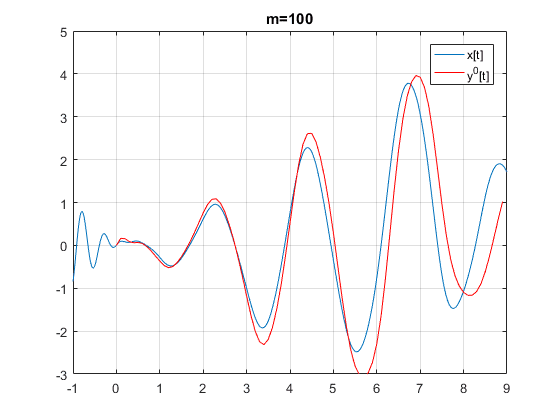
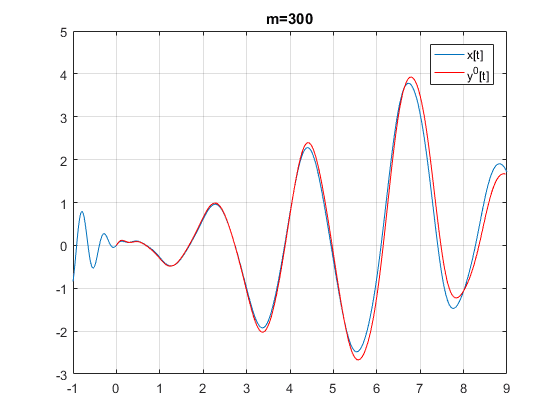
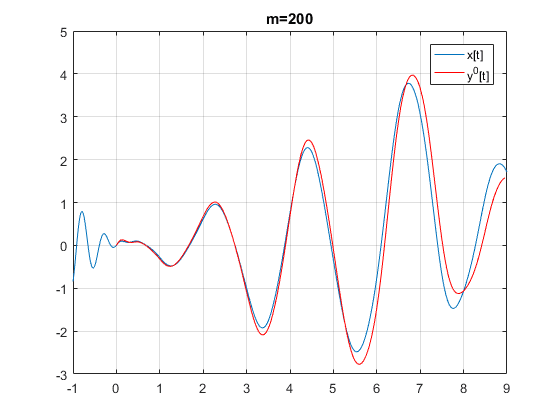
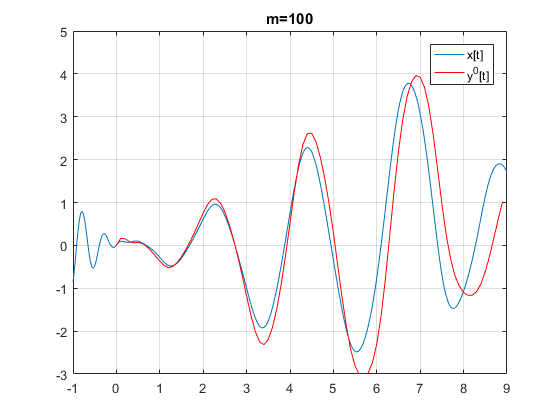
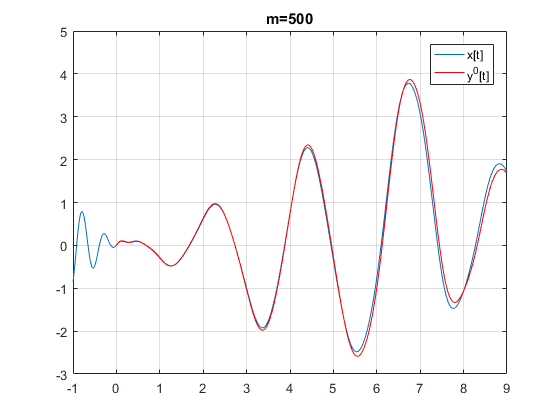
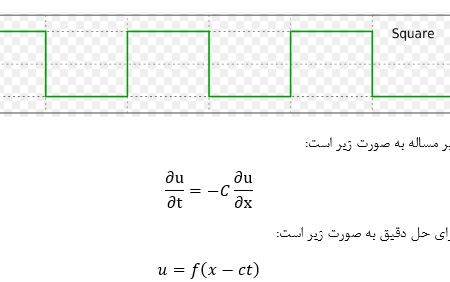
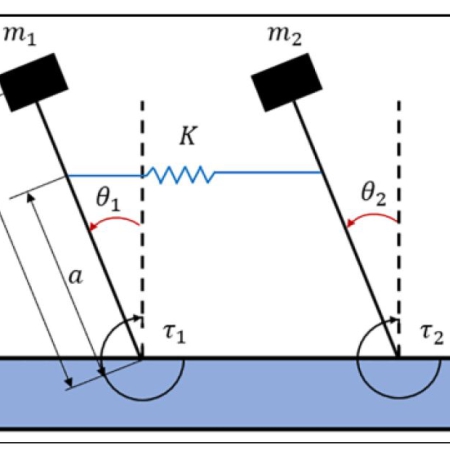
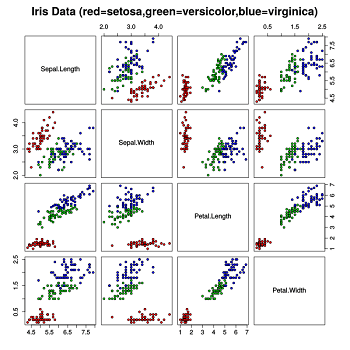
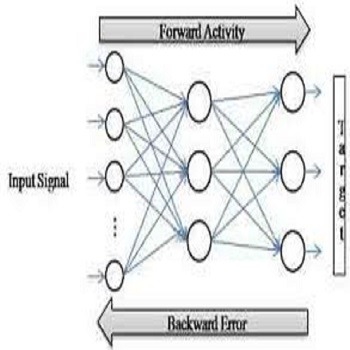
برخی از نتایج
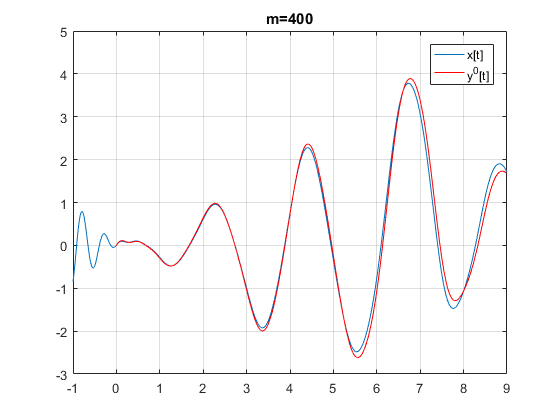
شبیه سازی آموزشی مقاله تقریب سیستم های کنترل تاخیر زمانی با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده .
- فایلهای پروژه آموزشی به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.