

توضیحات
تحلیل سینماتیکی مکانیزم از طریق تحلیل برداری با متلب
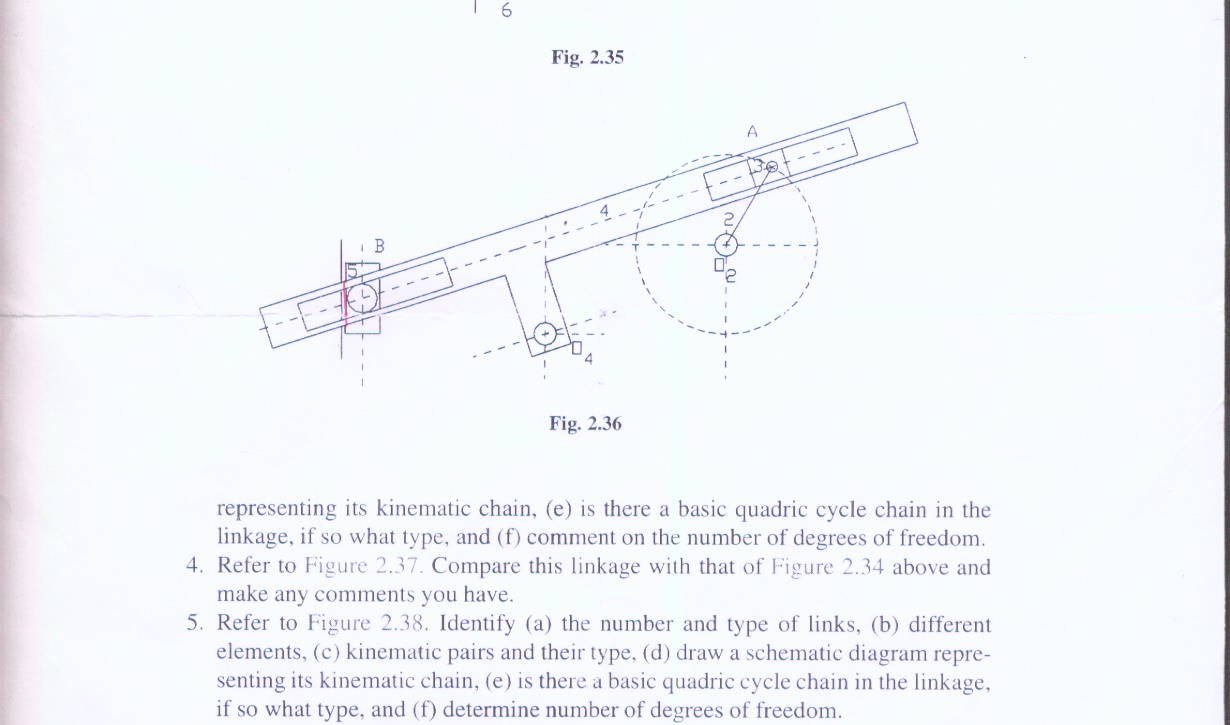
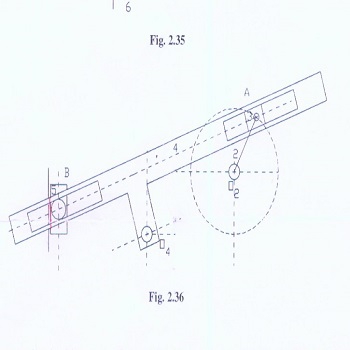
صورت مساله
مراحل انجام کار
حل دستی:
1-حل مسئله به روش برداری در فایل “halemasale” موجود می باشد.
نقطه یابی:
2-برای کار با نرم افزار نیاز به مختصات دقیق نقاط مکانیزم داریم،برای پیدا کردن این مختصات از نرم افزار digitizer استفاده شده است.
Matlab:
در نرم افزار matlab ،از حل تحلیلی استفاده کردیم
منظور از
a، موقعیت لغزنده 5
Adot: سرعت لغزنده 5
A2dot: شتاب لغزنده 5
Teta2: زاویه ی ورودی (بند 2:زاویه ی اولیه تقریبا 60 درجه است.)
Omega2: سرعت زاویه ای بند 2(ورودی) مقدار ثابت(2*pi/5) است.
Omega4: سرعت زاویه ای بند 5 خودم (بند 4 مسئله)
Alpha4: شتاب زاویه ای بند 5(خودم) (4 مسئله)
می باشد.
نمودارهای این بخش جداگانه آمده است.
Sam:
3-در نرم افزار sam working model مکانیزم رسم شده(شبیه شکل شما نیست، ولی همان مکانیزم است)
در این نرم افزار ابتدا نقاط پیدا شده از digitizer رسم می شود.
سپس لینک 2 را رسم میکنیم.
سپس از نقطه ی C (واقع بین نقاط A و B روی بند 4 شکل شما) (نقطه ی تقاطع بند 5 و 3 بنده) یک اسلایدر (بند 3) را به نقطه ی A متصل کردیم.
سپس از نقطه ی C یک اسلایدر به نقطه ی B رسم کردم.اونی که داخل بند 4 است(دایره ی کوچک متحرک)
سپس آمدم تکیه گاهها را مشخص کردم.
نمودارهای این بخش جداگانه آمده است
شما میتوانید نمودارها را با هم مقایسه کنید.
تقریبا شبیه هم هستند.
محاسبات کامپیوتر به دلیل تقریب زدن یه خورده با نتایج تحلیلی اختلاف دارند.
نکات قابل ذکر:
- تحلیل سینماتیکی مکانیزم از طریق تحلیل برداری با متلب توسط کارشناسان گروه ۱.۲.۳ پروژه پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
- فایل های پروژه به صورت کامل پس از خرید فایل بلافاصله در اختیار شما قرار خواهد گرفت.
- پروژه فوق بطور کامل در نرم افزار متلب شبیه سازی شده است.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.